I am in the process of rebuilding my ZMR 250 quadcopter and recently installed Emax MT1804 motors, which come in two versions, CW and CCW. The color coded spinners help in identifying which one is which..
The ones with the red spinners are motors that spin CCW as seen from above.
The ones with the black spinners are motors that spin CW as seen from above.
Please note that some motors are being shipped with silver spinners instead of red ones.

So how do you tell which one goes where?
First determine which motors go to what positions based on the type of multirotor, controller, firmware being used and the direction of the motor as seen from above.
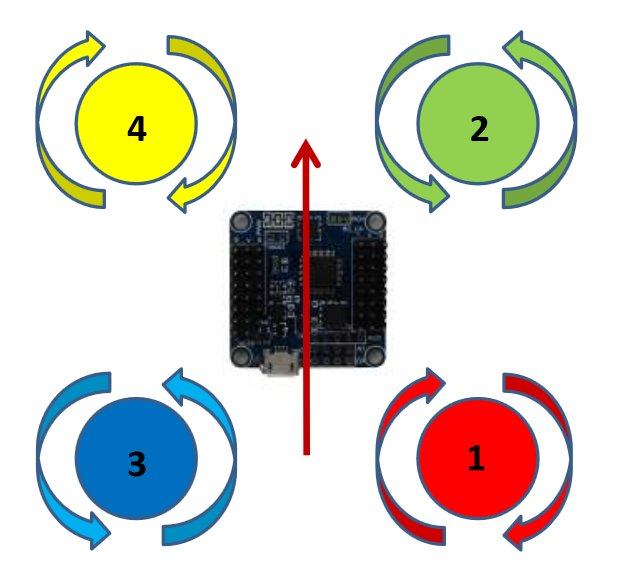
Hold the spinner in one hand and the bell of the motor in the other and spin the bell in the direction that the motor is supposed to spin in, when looking at the motor from above.
If the spinner TIGHTENS onto the motor shaft, then that's the correct motor for that position.
If the spinner LOOSENS from the motor shaft then that motor is in the wrong position.
Ok now, let's say that you are like me and installed the motors without knowing any of this and you only realized that you did something terrible wrong, like me, after you watch Josh put together the VersaCopter. How do you fix it without unsoldering everything?
Well, lucky for us that the CW and CCW motors are exactly the same motor, except that the bell is different. So why not just switch the bells?
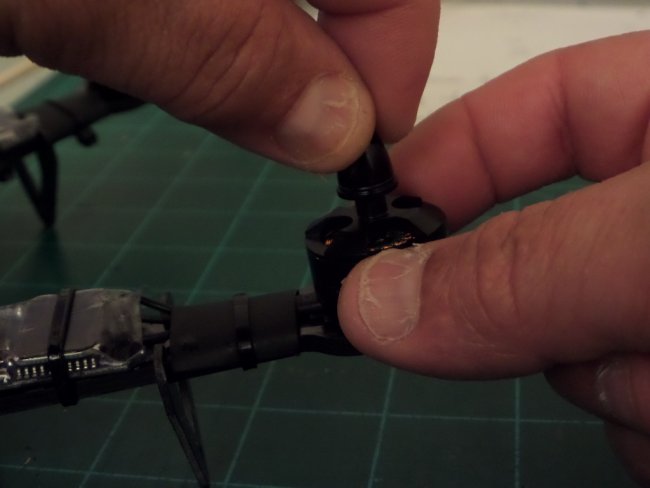
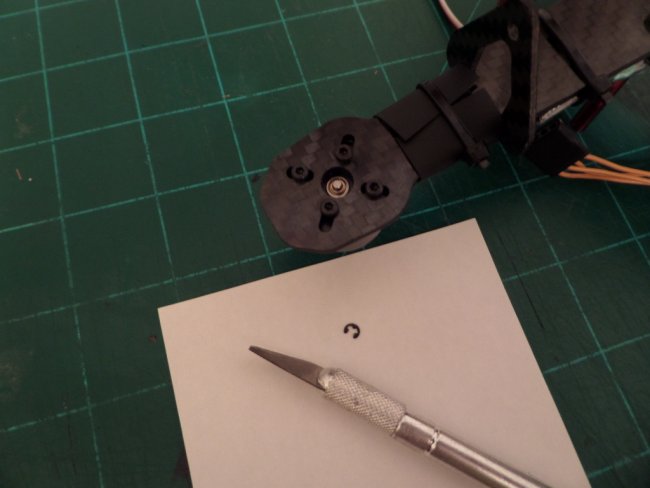
You may or may not need to remove the motors from the arms for this. Use an exacto knife or other small knife and remove the small C clip that holds the motor shaft in place. Be really careful not to lose one.
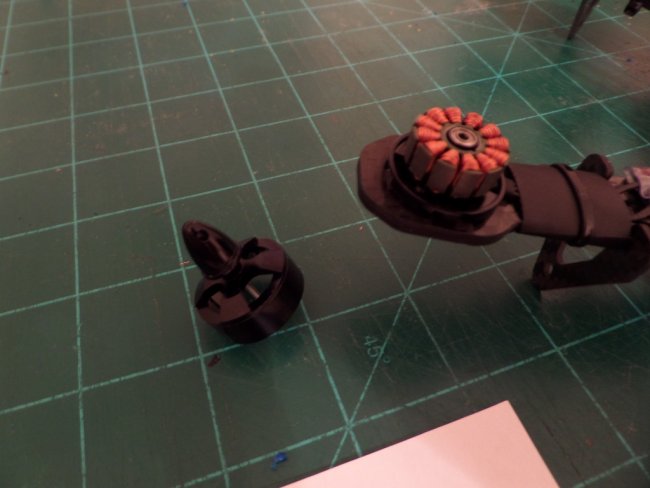
Gently lift the bell up. There will be some resistance due to the magnetic field. Once you have all of the bells removed, swap them around to their new positions. You may want to keep a diagram handy of where the motors are supposed to be so you do not make a mistake.
Once the bells are back in place, re-insert the C-clip onto the motor shaft.
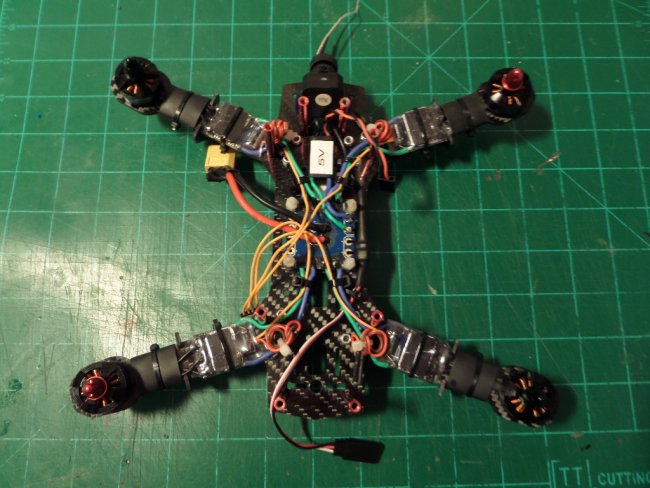
Here are the motors in their correct positions! Disaster avoided!









Log In to reply
Log In to reply
This issue can be fixed from software, you just go into CLI if using (baseflight, Cleanflight) and look for the "yaw_direction" (maybe not the exact name but you got the idea) it is set to 0 by default, set it to 1 and the yaw direction is inverted.
This solves your problem because the only difference is in the yaw direction if you mix the CW, CCW arms.
Log In to reply
Thanks for sharing the info!
Log In to reply