This story had started in early june of this year when I accidentially found a student challenge announcement,rules and requirements.
To join this competition, you've should been create a team, design your UAV project, send 2 reports, build it, make a presentation and finally complete qualification and final flights. Off course, teams were rated and scored for every stage.
As I have very few friends and none of them could help with this project, in fact I had to do almost all of this work on my own. According to the rules, I had to have a graduate or master mentor in my team. So I have chosen my graduate project chief - she helped me a lot on the early stages, and when it came to scratch building and flight testing - I had a lot of practical experience and knew better what to do.
According to requirements, UAV should've been electric powered, lighter then 3 kg (penalty for every extra 50 grams), capable of flying autonomous GPS missions up to 5 km with 600 grams of payload and GPS/barometer tracker (around 100 grams) onboard, take off and land without extra devices and have as high lift to drag ratio as possible.
My first idea was to adapt already existing design for this role - successfull, simple, reliable and extremely versatile new RC trainer looked like a perfect choice. 
It proved to be excellent and very efficient platform for long range and high altitude FPV flights, bombing raids lifting and dropping mid-air any external cargo up to 400 grams.


Twin engine layout and fiberglass skin could increase its payload, so I started to build a new airframe. It's extremely fast and easy to build, so I ignored some potential serious problems, such as too narrow fuselage and limited wing area.
It required a large and ugly external container to fit cargo and electronics inside. It could cause substantial drag increase and stability issues, so I really didn't like this option.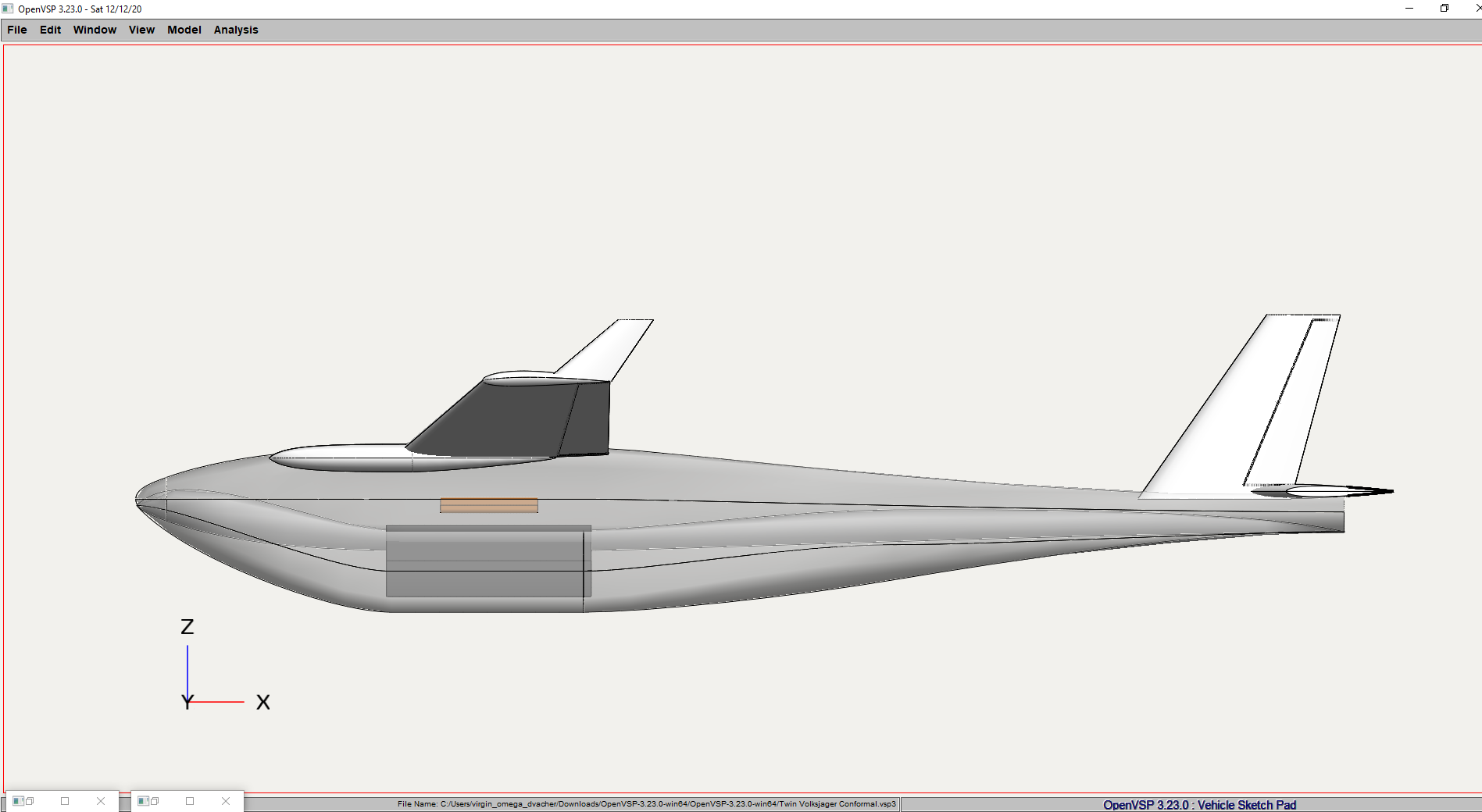
I discovered it after first report was ready, so I had to make a difficult choice - to continue old, but questionable project or go back to the drawing board and start completely new design.
As I can design and build new airframe very fast with my proven rapid design & construction tecniques, I started a new projet.
Basically I took an old layout and upscaled it around 2 times.  To optimise design, I used completely different type of the fuselage - it had mostly circular cross-section (exluding wing fairing) to minimise drag and maximise capacity. It was 2 meters long and 30:1 fine ratio, so it had to be collapsible to transport this big bird easy by any kind of transport. And circular cross-section allowed me to use 3D printed bayonet mounts. And as I had collapsible fuselage, I didn't need a hatches or cuts to access the cargo compartment and electronics, so I was able to make a pure monocoque.
To optimise design, I used completely different type of the fuselage - it had mostly circular cross-section (exluding wing fairing) to minimise drag and maximise capacity. It was 2 meters long and 30:1 fine ratio, so it had to be collapsible to transport this big bird easy by any kind of transport. And circular cross-section allowed me to use 3D printed bayonet mounts. And as I had collapsible fuselage, I didn't need a hatches or cuts to access the cargo compartment and electronics, so I was able to make a pure monocoque.

Wing also had to be sectional - and I made large 3D printed mounts for it.
As you can see, there are 3 details in 1 - motor mount, wing lugs and reinforced wing rib. It connects to the balsa wood spars. Main spar is I-shaped, like manned planes have, so it can bear large load.
Airframe has 6 main parts. Combined medium fuselage + wing root section is a backbone of this airplane. Cargo compartment and motor mounts are placed here. It also has offset flight controller mount in its aft joint. Nose part has FPV and battery compartment. Aft section holds horisontal tail and collapsible fin. And there are also 2 outer wing sections.
So this plane can fit in a large plastic bag or suitcase. However almost everyone in the field recognised decomposed plane as a crashed one.
Plane was successfully tested more the a month before deadline, I even used my new Trainer loitering around in RTH mode as sort of chase-plane.


 However some problems were discovered during this test. Serious and paint issues, growing weight, lack of power, cracks in some 3D printed parts, but aerodynamics, stability and control were perfect. It also lacked flight controller, FPV and LRS that time.
However some problems were discovered during this test. Serious and paint issues, growing weight, lack of power, cracks in some 3D printed parts, but aerodynamics, stability and control were perfect. It also lacked flight controller, FPV and LRS that time.
After month of modifications the beast was ready. But the second flight attempt was a complete failure - it falled down like a brick with its original engines. It became even heavier and required much more power. So I quickly found a perfect solution - I took the most powerful engines I had from my retired giant plane and purchased new ESCs and 6S battery.

Needless to say it became even heavier, but the first flight with its new engines I made early morning 3 hours before the presentation and 4 days before the deadline was extremely successfull.



I presnted my project and finally was able to see rival proposals 










I was surprised to see many VTOL designs here. VTOL capability wasn't really necessary to meet the requirements and I abandoned this idea even before drawing first sketches, because it was too risky to make such a complex, costly and potentially unreliable thing without practical experience or teammate who had already done some kind of VTOL. And my approach to make the aircraft as reliable and simple as possible worked, because all VTOLs couldn't perform even qualification flights for many reasons. After presentation I continued test flights and training for the final stage. My plane successfully carried 750 grams of cargo and had maximum speed around 120 kph and could cruise at around 70-80 kph or twice as fast as all of my previous planes. 



I liked this challenge because of very friendly atmosphere, collaboration of different teams and common interest of all who joined this event. Leaders of this event gave us access to the workshop where we could store, charge, repair, complete or modify our creations. And this facility became a "club" for all of us. I helped a rival team to hot-wire their wings, other team helped me to adjust some settings for waypoint mission.
The day before qualification and next morning several aircrafts were lost. 





Only 4 planes were left for qualification flights.
To complete the mission, aircraft should follow this route in GPS mode with trackerer onboard.
3 planes successfully completed this mission, 4th had some problems with software.




The next day there were 2 final flights - empty and fully loaded. 4th plane after failed launch attempt completed its qualification flight

After score was calculated, I got the 3rd place - my plane was heavier then 3 kilos and I got a penalty for it. But in fact I got more money then silver and even golden teams, because my "team" had a single member. I also found a few good friends there, and got some ideas for my future project.
I also found a few good friends there, and got some ideas for my future project.
There are some pictures and videos of my airplane











Log In to reply
Log In to reply
Log In to reply