Send the TA Sequoia (halfway) to space! Why not.
A year or two ago I met a brilliant guy by the name of Kemal Ficici. He talked about how he really wanted to send a High Altitude Balloon up, similar to what David Windestal had done. I wanted to take part in it as well and offered to design the aircraft that would return the payload and.. well it kind of died there until about a week ago. The college I currently attend has an annual STEM fair and I learned about it a week or so back as well, so you can tell where this is going.
What we initially wanted to do with the aircraft was that we would equip it with directional antennas and low frequency radios so we could essentially have strong radio connection even at 10km up, but that led to some problems. What if it suddenly got cloudy? What about the cost of the radio equipment? What about FPV and live video? Then we thought, why not just cut the pilot out of the equation? In Davids case, an unforseeable accident had happened which prevented the pilot from controlling the aircraft. Plus, for my Computer Science final project I had lazily finished up a program that would stabilize an aircraft so I decided that it really wouldn't be that difficult to make an autopilot program.
Optimize the Sequoia to fit current needs
Anyhow, the aircraft currently had some problems that I wanted to address while designing this one.
The main problem was with gliding
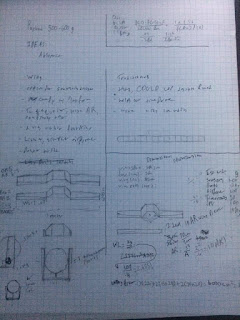
In normal flight this aircraft is great. Stall characteristics are wonderful, it could cruise at slow speed, or could go as fast as the motor would let it. The main problem was induced drag. Every time I would cut the throttle, the aircraft would begin slowing down almost instantly and could not retain its speed very well like a glider would, and thus lost a lot of its glide slope to that. In order to improve this I decided to reduce chord and increase the aspect ratio. I sketched up a couple design ideas, estimated what the weight would be and calculated a desirable wing loading and aspect through that. One other thing I decided to do for the High Altitude Balloon (HAB) version was that I wanted the wings to not be under constant stress during the climb. The wings would fold up in a |_| shape and hug the balloon with 3 connection points. At the proper altitude, the wings would cut themselves off from the balloon first, connect with the wing spars (probably magnetically, thats a problem for another day for now), and then the main body would be released freeing the aircraft from the balloon. The aircraft would also have its elevons integrated into the wing rather than extended from the wing. This was probably what I was excited about the most, this way the AR would be increased, induced drag released, and rolling would be more efficient.
Elevon concerns

Now that the wing is actually built I can see that i've made a mistake with the elevons. I feel like they're a tad bit small for what we need them to do but i'll push through with it. If problems persist i'll just glue some extenders behind it since I really dont have time to build another wing. Here's a short clip showing off how they work by the way
The main reason I'm concerned is that even if it passes alright in our low altitude tests, the air pressure is a lot lower up at 10, 20, and 40k km altitude. So, it probably definitely wont work up there, but I have some time until the high altitude tests so that's a problem for another day.
Week two plans
Now that i'm actually done with the aircraft, save for the vertical stabilizers, I'll have to order sensors and everything else that will be used on the arduino board that will bring this whole thing back. After a couple hours of that, I'll have to co-write the program with said brilliant guy (Kemal Ficici).
All in all, i'm really really excited for the next couple of weeks.
"Don't think too far into the future"
- Anonymous








Log In to reply